Cílem projektu bylo vyvinout moderní technologické řešení přesného montážního procesu drobných výrobků
Zde, v prototypovém a jednoúčelovém řešení, se jedná konkrétně o dva nově vzniklé typy plastových komponentů tlačítek, kdy se každé tlačítko skládá z vnějšího pouzdra, kovové pružiny a vnitřního trnu.
Pro zákazníka jsme řešili aktuální problematiku související s velkosériovou či větší kontinuální výrobou. Respektive dokončovací operaci v podobě celkové montáže a ověření výsledného stavu sestaveného celku v oblasti rozměrově malých plastových dílů.
- robotické řešení pro přesnou montáž a kontrolu plastových tlačítek
- minimální zmetkovitost a případná selekce zmetků
- kamerová kontrola správného tvaru výlisků
- přizpůsobitelnost pro více druhů tlačítek
- usnadnění lidské práce
- maximální výrobní efektivita
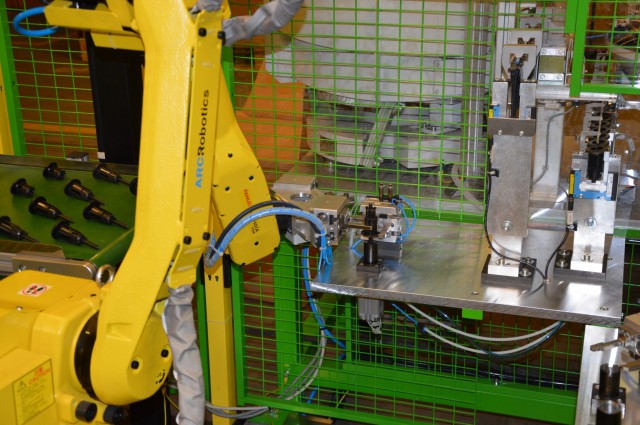
Řešení je koncipované jako samostatná robotizovaná buňka s robotem FANUC M-10iA/10M. Ten je na zápěstí osazen dvěma paralelními chapadly pro manipulaci s plastovými výlisky a paralelními chapadly pro manipulaci s pružinami.
V rámci komplexního řešení vzniklo pracoviště, které je dále vybaveno 4 ks vibračních zásobníků s vibračními lištami pro podávání plastových dílů, zásobníkem pro ruční vkládání pružin, 2 ks přípravků pro ustavení dílů tlačítek, kontrolní stanicí s kamerou pro kontrolu kvality dílů a výstupním dopravníkem. Bezpečnost pracoviště je zajištěna pomocí ochranného oplocení. Takt pracoviště je 25 ks/s.