Požadavkem zákazníka byla na vysoká autonomita pracoviště
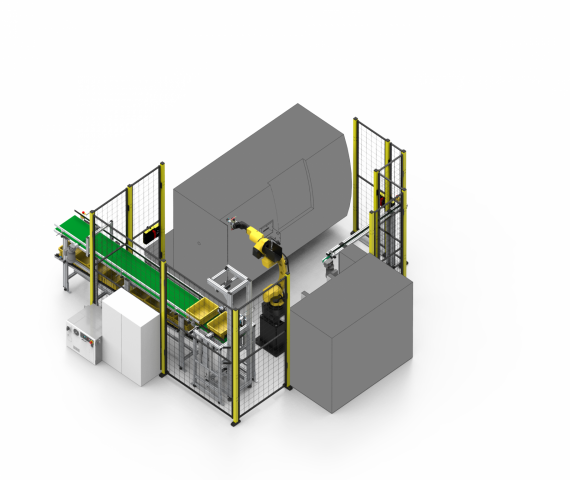
Zákazníkovi jsme dodali kompletní robotické řešení obsluhy dvou CNC strojů a měřící stanice. Vzhledem k požadavku zákazníka na minimální účast operátora u linky nebylo možné řešit vstup polotovaru do pracoviště ustavovacími přípravky nebo dopravníky, ale bylo nutné díly rozebírat přímo z KLT přepravek pomocí 3D kamerového systému.
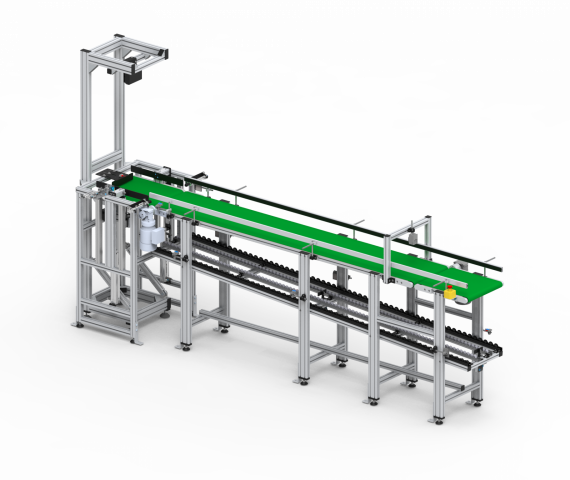
- operátor zakládá KLT s polotovary na vstupní dopravník
- zde je načten čárkový kód a přiřazen program do fronty
- proces robota začíná načtením KLT na vstupním dopravníku pomocí 3D kamery
- robot odebere polotovar z KLT na vstupním dopravníku pomocí magnetického chapadla
- přesné souřadnice polotovaru budou určeny 3D kamerovým systémem
- díl odloží do ustavovací stanice, kde bude polotovar ustaven do přesné pozice
- po ustavení jej robot odebere parelelními chapadly a postupně vymění v CNC strojích a měřící stanici
- OK kus odloží na výstupní dopravník
- NOK kus do NOK boxu
- po vyprázdnění KLT je přepravka svezena výtahem a přesunuta na výstupní válečkový dopravník
Řešení je koncipované jako pracoviště s robotem FANUC M-10iD/12 s nadstavbou HandlingTool. Robot je umístěn na kotevním podstavci ve středu pracoviště. Součástí pracoviště jsou dále dva CNC stroje, vstupní sada dopravníků pro KLT, měřící stanice a výstupní dopravník. Vstupní dopravník je koncipován jako soustava pásových dopravníků, kdy poslední je umístěn na pneumatické zdviži a po vyprázdnění KLT slouží k odvedení prázdné přepravky na výstupní válečkový dopravník. Součástí dopravníku je Al konstrukce s pevným kamerovým senzorem FANUC 3DV/400 pro identifikaci přesné pozice polotovarů v KLT přepravkách.
Robot je na zápěstí osazen magntetickým chapadlem pro odběr polotovarů z KTL a dvěma páry paralelních chapadel SCHUNK s na míru vyrobenými prsty pro výměnu dílů v CNC strojích. Součástí chapadla je 3D kamerový senzor FANUC 3DV/400 pro identifikaci přesné pozice dílů i plastových paletek.